

简述几种液位计的特点与实际应用
视镜是用于监控库存或处理罐中的状态水平的手动方法,因此它仍然是广泛行业的首选方法。由于采用了成本较低的储罐计量指示器和液位传感器,因此便于实时监控以降低库存成本并提高过程效率。集成电子设备可实现先进的传感器控制,可显着降低成本效益,现在可通过传统的硬连线或无线通信方式随时使用。
虽然当今的系统控制和维护工程师可以使用大量测量技术,但业务的一个事实仍未改变 - “购买技术上可接受的,成本较低的技术,以正确可靠地完成工作。”水平测量方法包括但不是仅限于:
磁翻板液位计浮子 - 这些装置在简单的浮力基础上运行,并且对于过程测量是有用的,其中与感兴趣的材料接触不是主要问题。浮子较近已经转向磁性技术,这提高了性能,但同时增加了成本。然而,浮子涉及移动部件,这可能会在某些条件或材料下产生可靠读数的风险。
磁翻板液位计 - 这些装置类似于浮子,因为它们与被测材料接触,但它们往往依赖于使用辅助柱的强永磁体。这使得当浮子移动时,高度位置的变化由磁化梭子传递。磁力计可以围绕流体比重进行优化,并且能够处理高压和高温。
静压装置 - 这些装置通常以压差为原理,非常受欢迎。它们被认为是准确的,但必须浸没在被监测的容器中才能工作。有多种这样的装置可供选择,包括置换器,起泡器型,以及较常见的压力传感器。为了准确起见,正确的校准和设置条件非常重要。静压装置以适中的价格提供广泛的测量和出色的精度水平。
雷达液位变送器 - 这些设备通常通过空气或导波。它们与其他声波技术类似,微波被传送到目标并反射回传感器天线。测量往返时间以获取距离。空气雷达技术以其远距离,相对长的死区,高设备成本以及使用顶空蒸汽的能力而着称。在某些情况下,空中雷达可能表现出与发散相关的结构干扰,并且设置可能变得乏味。除了成本之外的这些问题可以通过导波技术得到缓解,其中信号沿着与目标材料接触的刚性探针传播。
磁翻板液位计远传传感器-该传感器以捆绑的形式固定在磁翻板液位计或顶装式磁性浮球液位计的主导管外侧,使其处于液位计同一磁耦系统中,当磁性浮子随液位上下移动时,对应液位位置的干簧芯片组受浮子内磁场的作用而动作,电阻链阻值发生变化,通过转换模块将变化的电阻信号转换成二线制4~20mADC标准信号输出,该信号可方便地与微电脑工业智能控制仪配套使用,或接其它二次仪表,从而达到显示、控制、调节和报警的目的。
电容传感器 - 这些传感器的功能是基于所确定的流体具有介电常数并且电容变化随液位变化的假设。测量由非绝缘棒或绝缘棒产生,参考目标材料或参考探针或靶材料。当电容发生变化时,可以建立相应的电平变化。
超声波液位传感器 - 这些非接触式设备因其易于使用,技术能力的混合以及较低的总体拥有成本而早已为各种行业的主力设备所熟知。在概念上类似于空气雷达的超声波传感器传播来自压电传感器的超声波脉冲,该压电传感器轰击测量目标并被反射回来。测量声音的往返时间速度,其通常在40kHz至300kHz的范围内,以确定到物体的距离。传感器具有温度补偿功能,通常用于空气气氛。然而,它可以在存在基于化学浓度的特定顶空蒸气的情况下有效地起作用。
连续监测或超声波液位测量控制常见于水,柴油,糊状物和固体材料粉末,化学液体,颗粒或散装产品。通常称为空气传感器,超声波传感器或液位变送器,该技术可靠且成本低。Sonic技术仍然是化学品,农业,采矿以及水和废水应用的首选液位测量方法。
液位测量选择器
超声波传感器可根据较适合任何给定应用的工作频率进行分组。由于波长是确定较佳测距能力的重要因素,因此短距离应用(如较小的水箱,垃圾箱和手提箱)只需要超过6到7英尺(2米)的距离,但也需要一个只有几英寸的短死区。对于这种短距离应用,适当的工作频率如150 kHz是较佳的。对于中等范围的应用,例如,更接近90kHz的20英尺(6米)操作是优选的。通常,通过将频率降低到40到50 kHz,可以实现长达30英尺甚至50英尺的更长距离。但是,频率不是较好的的因素。其他考虑因素,如光束聚焦,声压和传感器控制算法,在设计中起着重要作用。从应用的角度来看,目标材料是主要因素。下表概述了哪些技术较佳使用位置。
MAT超声波液位传感器的油箱安装指南
目的
本节有助于为MAT超声波液位传感器选择适当的安装位置,因为安装不正确可能会导致测量结果不准确。
概观
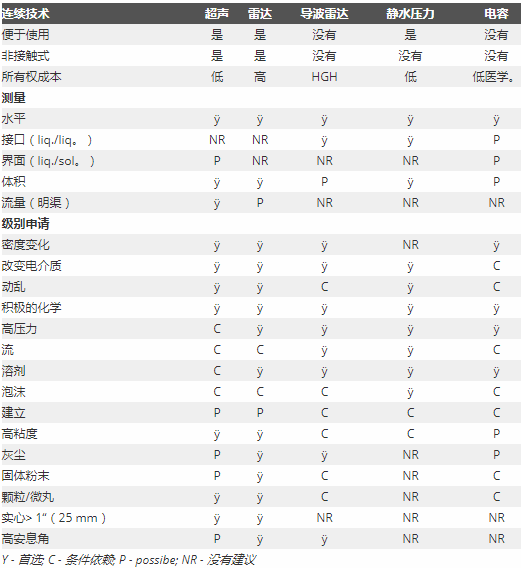
使用MAT超声波液位传感器时,会发出一束窄的超声波声音,它会从水箱中的液体表面反射回来并返回传感器(图1)。通过测量从传输的声音脉冲传播到液体表面然后返回传感器所需的时间量来确定到液体的距离。
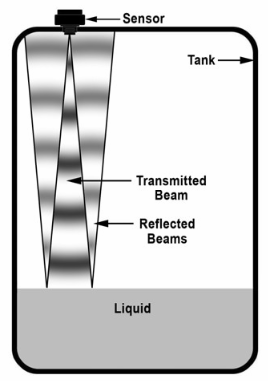
图1.显示安装在罐上的传感器的图示,该传感器传输从液体表面反射的锥形超声波束。
为了获得精确的液位测量,传感器应正确安装在水箱上,使液体表面的回波返回传感器,声束路径中的物体不会产生“虚假回波”。
以下段落讨论了应避免的一些标准安装问题。
安装问题
不正确的“空罐”报告,由于“偏离角”回波不会返回传感器
MAT超声波液位传感器应安装在水平位置,这意味着锥形声束垂直于液体表面。在声束的轴不垂直于液体表面的情况下,反射的回波将不会返回到传感器以进行检测。有几个因素导致传感器无法解决问题,例如,如果传感器安装在“偏离角度”(图2),则回波将无法检测到。如果油箱倾斜使得顶部和底部不平坦,则会遇到类似的情况。为了解决这个问题,传感器可以安装自调心散装头配件。
插图显示传感器安装在油箱“偏离角度”,以便反射回波不会返回。
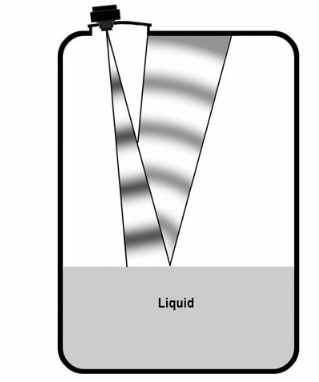
图2.显示安装在油箱“偏离角度”上的传感器的图示,以便反射的回波不会返回。
由于声束路径中的障碍物,“高液位”报告不正确
超声波束路径应该没有任何障碍物,因为这些障碍物可以反射声音并促进“假回波”以在来自液体表面的回声之前返回传感器。图3说明了必须避免的一些标准安装问题。
插图显示声束中的障碍物如何产生“虚假回声”。
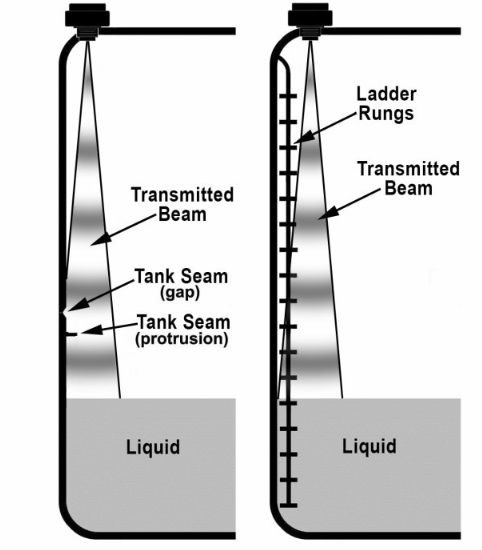
图3.显示声束中的障碍物如何产生“虚假回波”的插图。
如果安装传感器使得声束在液体表面之前撞击油箱壁,则油箱侧面上或附近的任何反射表面都会产生“虚假回波”。反射表面的一些常见例子会产生“假回声“是安装在水箱中的结构,例如梯子,或突出或凹陷的水箱接缝。要解决此问题,可以将MAT传感器安装在靠近油箱中心的位置,这样声束就不会与任何反射表面或物体相交。
当油箱被填满时,“高液位”或“空油箱”报告不正确
坦克可以从顶部或侧面填充。在从侧面进入水箱的液体与声束相交的情况下,它可以分散声音,使回声不会返回传感器,或反射声音并产生“虚假回声”。流体从任何一个进入水箱侧面或顶部可以显着地搅动液体表面。这会使声束分散,产生的微弱回波可能无法返回传感器。这两种情况如图4所示。
插图显示了如何填充坦克可以破坏声束并产生“虚假回波”或回声太弱而无法被检测到。
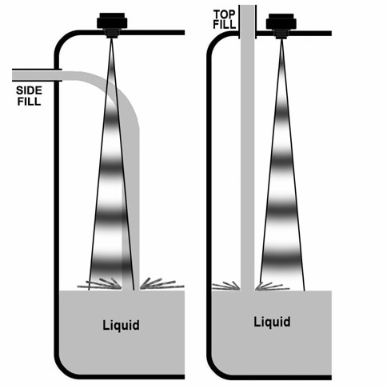
图4.显示坦克填充如何破坏声束并产生“虚假回波”或回波太弱而无法检测的插图。
要解决此问题,必须将MAT超声波液位传感器安装在一个位置,以使声束不受进入流体的影响,或者在填充液体表面时应忽略所采用的液位测量。用户应该等到液位足够高以产生可检测的回波。
传感器安装在立管上引起的“高液位”报告不正确
如果将MAT超声波液位传感器安装在长立管上,可以反映出“虚假回波”,该立管具有足够小的直径,使声束轰击进入油箱的开口处的侧面。传感器解释来自开口的回波,该回波在液体表面的回波之前到达,为“高液位”。
为了解决这个问题,可以采用较短的立管或较大直径的立管,或者可以降低传感器的灵敏度。
解决常见的安装问题
如果使用“标准”通用传感器模型,可以如所描述的那样克服先前的安装问题示例。MAT还提供“plus”模型,能够使用高级信号处理和设置菜单克服许多问题。请咨询MAT应用专家,以确定适合您应用的较佳传感器。
- [公司新闻] 磁翻板液位计有测量盲区吗 2021-12-06
- [行业新闻] 差压变送器该怎么维护 2021-11-29
- [行业新闻] 浮球液位计保养时注意事项 2021-11-25
- [公司新闻] 磁敏双色液位计与磁翻板液位计有什么区别 2021-11-16
- [公司新闻] 造成磁翻板液位计内浮子下沉的常见原因都 2021-11-10
- [技术专题] 石油储罐液位测量选择雷达液位计后的安装 2012-10-26
- [技术专题] 超声波液位计的优点和清洗方式 2012-10-20
- [技术专题] 怎样选购高温高压型磁翻板液位计 2012-10-20