

如何实现较佳料仓水平测量与化学过程中的液体水平测量
能够准确评估整个工业和化学过程中的液体水平是实现高效自动化控制的关键。
近年来,工业和化学过程中液体的测量已经发生了显着变化。越来越复杂的处理系统和严格的环境法规的引入要求高精度和可靠的性能。制造商通过使用现代技术开发替代测量方法做出了回应。
过程工程师面临着多种选择,从点水平测量传感器到连续水平变送器,使用从差压到超声波和雷达的各种技术测量范围。
有这么多选择和投资成本范围,您如何选择?
没有完美的技术。通常,几种方法可能适合于应用。在选择较合适的解决方案时,需要根据操作参数权衡每个解决方案的优点和局限性。在化学工业中,测量设备还必须在恶劣且通常危险的条件下提供一致的性能。
为了在您的筒仓水平指示上获得较佳性能,您首先需要了解您的产品,其行为以及所处理的设备。
您正在测量的产品
- 了解您的产品行为,交付时间和存储时间。在灌装过程中它是否通气,它是如何流动和处理的?
- 它的特点是粘性,侵蚀性还是磨蚀性?
- 它是否存放在温度下,它是否会释放出高浓度的湿气?
- 产品表面的表现如何?(休止角)
- 较后,预计会有很多粉尘吗?如果您不确定,也许可以与流程操作员或供应商讨论一些见解。
筒仓
- 筒仓是如何填满的?
- 填充时的表面轮廓是什么?
- 它是否会散发掉灰尘?
筒仓的内部几何形状/形状:直径与高度的关系,即从高到直的宽度可能需要使用表面映射进行多点测量,而高和窄对于一个传感器来说是完美的。
尺寸图非常有用。什么是产品出类似的?它是一个核心流量,或质量流量(谷歌它!)排放,或者如果它是一个平底,是通过螺旋进料或移动地板清空的材料,它在排空时如何影响表面轮廓?这可能会影响您可以测量的距离或材料留下的数量,即使没有任何结果。
测量目标?
准确性?体积的测量或转换为重量? - 堆积密度是否因产品来源,材料变化或填充过程中的曝气,您需要填充的容器有多高,溢出的可能性以及对安全和环境的影响有何影响?
您是否需要为体积测量提供额外的点水平保护?不同的产品密度甚至可以欺骗称重系统,使筒仓容量错误!您想和谁分享信息?从指标到互联网,这里有许多不同的可能性。

技术和传感器定位
如果您能够获得上述大多数问题的答案,将有助于缩小技术或设备的范围。您可以使用技术查找器和配置工具之类的东西来指定所需的设备。但是你不必自己做这件事。更好地为信誉良好的传感器制造商提供多级技术。
让他们检查您的信息,建议设备,位置和准确性的想法,以确保它符合您的目标。选项可能会随着进入料仓安装或填充点的位置而变化。
取得适当的平衡
虽然目的适用性至关重要,但必须与成本(特别是有多个测量点的地方)进行平衡,与潜在的运营收益相关。
模拟变送器继续提供适用于各种应用的经济有效的解决方案。现在,即将上市的较新车型将提供更高的运营自由度。
取得适当的平衡
虽然目的适用性至关重要,但必须与成本(特别是有多个测量点的地方)进行平衡,与潜在的运营收益相关。
模拟变送器继续提供适用于各种应用的经济有效的解决方案。现在,即将上市的较新车型将提供更高的运营自由度。
维护和清洁也是可能发生液体积聚的重要考虑因素,因此请确保变送器的设计便于安装和拆卸,以便进行日常清洁。
面对日益复杂的测量解决方案,模拟变送器确保其位置,以经济的价格确保更高的产品质量,更高的安全性和更少的浪费,现在具有可编程性的额外好处
在散装固体材料中正确定位液位测量传感器
在散装固体材料进出储存筒仓的过程中,自由流动材料表面的形状发生变化。安装在筒仓顶部雷达液位计的正确位置将使产品内容测量具有更高的准确性和可靠性。以下是指大型圆形筒仓,通常不能轻易装配称重传感器。
通常,传感器安装在筒仓顶部并测量距离材料表面的距离。然后可以将该测量距离转换为材料体积。用于此目的的技术包括雷达液位计,超声波和TDR(时域反射计)。
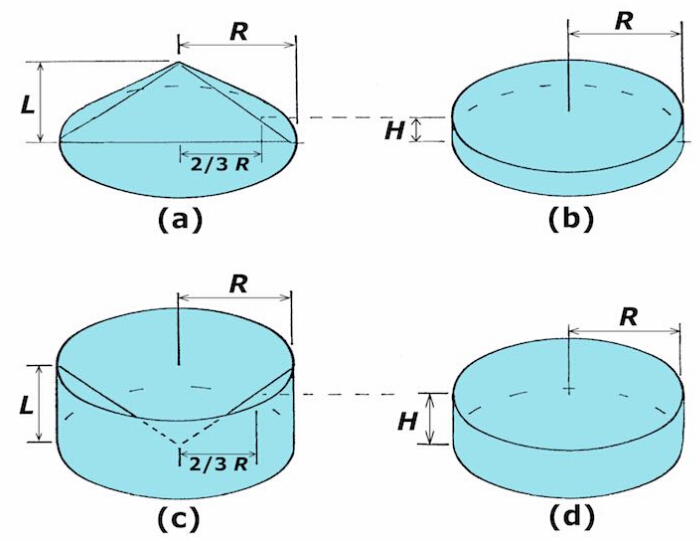
图1(a)示出了高度为L且基部半径为R的锥形材料堆。这种锥体的体积(V 1)由V1 = 1 /3πR^ 2L给出
图1(b)示出了具有相同基部半径R和高度H的圆柱形状。圆柱体积(V 2)
der由V2 =πR^ 2H给出
如果圆柱体的体积与圆锥体相同(V1 = V2),其高度H将为1/3×L。
在图1(a)中,圆点上的点锥体的上表面在H的高度或1/3 L处,在基部上方的半径为2/3 R.因此,如果在2/3的半径处测量锥形材料堆的高度R,可以通过将该高度乘以基础面积来找到体积。无论材料的休止角如何,这都将给??出正确的体积。
现在考虑图1(c)所示的锥形凹陷。该形状的材料的体积V3由V3 = 2 /3πR^ 2L给出
类似地,图1(d)中所示的圆柱体的高度H为2/3 L.图1(c)的凹陷的上表面上具有该高度的点的半径为2 /因此,如果在半径为2/3 R处测量锥形凹陷的高度,则可以通过将该高度乘以基础面积来找到材料的体积。独立于休止角给出正确的体积。
对于锥形或圆锥形凹陷,通过测量距离其中心的筒仓半径的2/3的任何点处的高度,可以找到正确的体积。这是安装液位传感器的理想位置,当填充期间表面是完美的锥形桩或在清空期间完美的锥形凹陷时是准确的。
但是,在过渡阶段仍然会出现错误,当填充后清空时,反之亦然。如果探头位于中心位置,则会导致严重错误。然而,通过将换能器定位在筒仓半径的2/3处,在从填充到排空再到填充的转换期间的误差通常不大于较大含量的3.0%。
声学相控阵技术
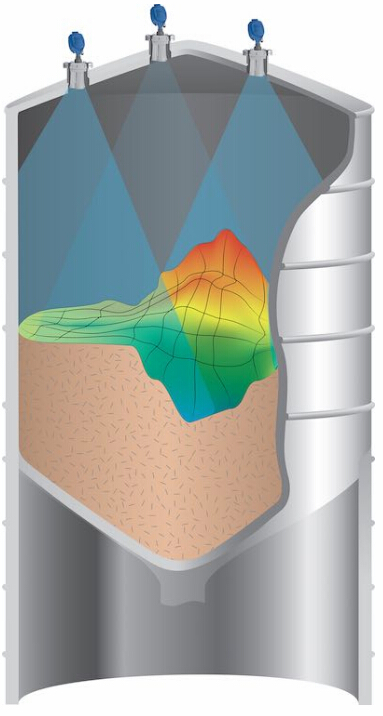
测量筒仓中固体的水平和体积是复杂且具有挑战性的。固体表面不均匀且不断移动,其各种峰和谷之间的水平差异可能很大。特别是在较大的筒仓中,单点水平测量的价值远低于对较大水平,较小水平和总体积的理解。
固体物位测量的传统机械方法具有有限的精度,可靠性和测量的可重复性。此外,它们可以通过手动执行测量或执行定期维护来使工人暴露在危险条件下。因此,许多现代设施采用连续自动测量技术。
声学相控阵天线是较广泛应用的自动化技术之一。基于声学相控阵技术的三维实体扫描仪具有三个天线,可产生声音或声音信号的混合,并从筒仓内容接收多个回波信号。
这些回波信号的数字分析产生多个测量点,以实现精确的连续水平和体积测量。将接收的数据与已知的筒仓尺寸相匹配允许这些扫描仪计算几乎任何类型的存储内容的体积,包括难以测量的飞灰和具有低电介质的材料,这将挑战其他技术。
在非常大或不规则形状的筒仓中,可以使用多个3D扫描仪来提供必要的控制水平。通过合并它们各自的测量值,用户可以获得组合的墙到墙表面图。
这些声学设备的较新增强功能是分析功能,通过持续分析产品流和运动来支持改进的安全和库存管理,从而满足其他市场需求。
例如,具有3D扫描功能的新设备通过将大型筒仓分成多达99个单独监控的部分来帮助优化填充和清空过程。
为每个部分提供平均,较小和较大水平读数,以便更好地了解材料流动和运动,然后可以切换填充点以确保材料在整个表面区域均匀分布。这消除了对材料分布的人工调查的需要,从而提高了工人的安全性。
重心(COG)是储存固体应用中的另一个重要考虑因素。当大部分材料位于筒仓的COG外部时,会产生应力,导致结构倾斜甚至坍塌。
激光水平和体积测量
激光水平测量提供了一种简单的方法来获得精确,可靠的料仓水平测量。
为什么激光水平测量?
由于其使用简单,转化为低成本的操作。激光束在空间中移动时几乎没有发散,这意味着它们即使在远距离也能保持紧密聚焦。
由于激光束不与周围环境相互作用,因此不需要消除虚假回波:仅检测液体或固体表面。因此调试更简单。此外,环境的变化不需要改变传感器参数。
例如,船舶侧面的材料积累将随时间而改变,需要重新映射虚假回波。如果移动传感器,也会发生同样的情况。激光水平测量永远不需要这样做。因此,它在使用过程中可以提高可靠性和使用时间。
激光束也从表面反射回来与超声波或雷达波非常不同,这在几种应用中是有利的。与液位计相比,激光传感器可以轻松检测塑料,聚合物和低密度材料。此外,对用激光测量固体的入射角没有限制,这简化了安装。
由于非常狭窄,激光束还可以用于狭小的空间和难以应用的应用,例如通过管道和阀门,网格测量,以及在搅拌器和搅拌器的存在下,激光束可以在搅拌器的边缘之间发送,船只方面无干扰地测量。
激光水平测量用于许多类型的筒仓水平测量应用。例如,在农业方面,它在许多类型的谷物如玉米或小麦上表现良好。对于木材产品,在存在壁积聚的情况下进行测量的能力大大降低了维护成本,因为测量对积累不敏感。
对于广泛用于制造塑料物体的塑料颗粒,激光水平仪提供了一种简单的解决方案,因为它可以测量难以用于液位计的塑料。激光器还用于几种聚合材料料仓级应用。
总之,激光会改变你看到水平测量的方式。它将简化操作并允许在迄今为止无法进行非接触的应用中进行非接触式测量。通过将新技术应用于工业级测量,激光水平使测量变得容易。
无线传感器控制系统
无线资产监控系统,无需布线传感器,可能会发生雷击,沿着电线传播并破坏与其相连的设备,以及在定期维护任务中造成的损坏。
无线电节点与安装在筒仓中的水平传感器无线连接,以提取数据并将数据传输到用作中央处理集线器的网关。请参见图1.连接到网关的以太网接口模块将信息绑定到局域网(LAN,有线或Wifi)以进行本地访问或蜂窝调制解调器,例如,农民可以在笔记本电脑和智能手机上实时访问库存水平。

图1.连接农场 - 从任何地方获取有关农业经营的信息
不受与布线相关的接地故障的影响,无线遥测系统不易受雷击损坏,因为只有命中传感器可能会损坏,而不是整个网络。
无线遥感系统还允许在筒仓的任何高度和位置安装水平传感器。在网状网络上操作,传感器控制系统可以部署在大面积上,以绕过可能阻碍其他网络的无线电传输的山丘,建筑物和其他结构。
强大的网关可以容纳来自现场传感器的数百个收发器输入,使网络能够覆盖10,000英亩的大型农场的地理范围,大约相当于15平方英里。
通过自动化筒仓监控活动,农场主知道何时需要切换到另一个筒仓或重新填充库存。结果,农民提高了生产效率。
筒仓测量的流动特性
如前所述,筒仓水平的测量可能由于表面轮廓根据填充和排空模式而显着变化而存在困难。这些将取决于筒仓及其排放设施采用的设计,流动模式产生漏斗流量,膨胀流量或质量流量。
流动模式的选择通常基于存储的散装材料的特性; 选择“质量流量”是为了避免产品流动前景或质量随时间恶化的无限停留时间,“膨胀流量”用于不受长期停留影响的不良流动材料和“漏斗流量”用于惰性,相对容易的流动材料或具有某种形式辅助排放的筒仓。
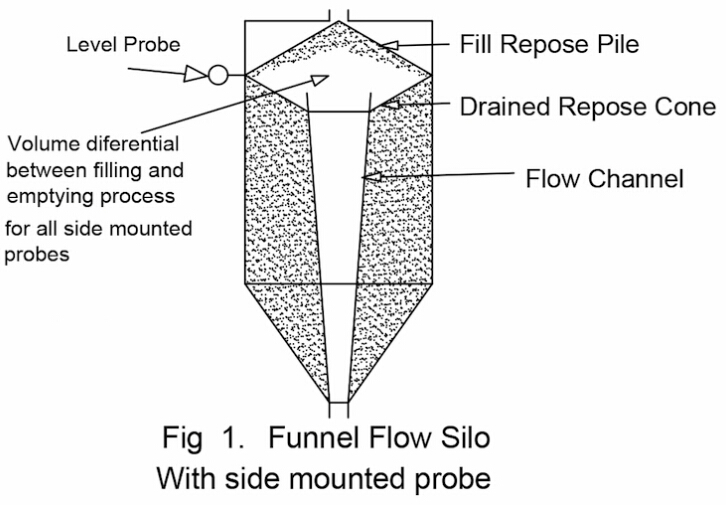
“漏斗流”优先从出口处的区域提取,具有排水休止的表面倾斜度。与单点出口相结合,当筒仓卸料时,这会在表面轮廓中产生锥形凹陷。相反,单点入口点在填充过程中形成上升锥。
“膨胀流”模式将在排放期间在该锥体内形成中心平台,其尺寸取决于料斗部分中的过渡直径。叠加在这种模式上,单点填充将产生一个生长堆,其特征在于产品的倾倒休止角。
通过渐进式抽出螺旋进料器进行的排放将使流动通道扩散并将排空差异减小到2D情况,但使再填充位置复杂化。
因此,在漏斗流中的圆形筒仓上的侧面安装的水平探针不能在+πD3.Tanθ/ 8和-πD3.Tanα/ 8的精度内指示真实的体积容量,其中D =筒仓直径,θ=倾倒的休止角和α=休止的休止角。
将θ和α大致为300,在料仓3 M直径上,这相当于约πD3/4√3或12 M3的体积,其中填充和排出条件将在水平上没有变化。图。1。
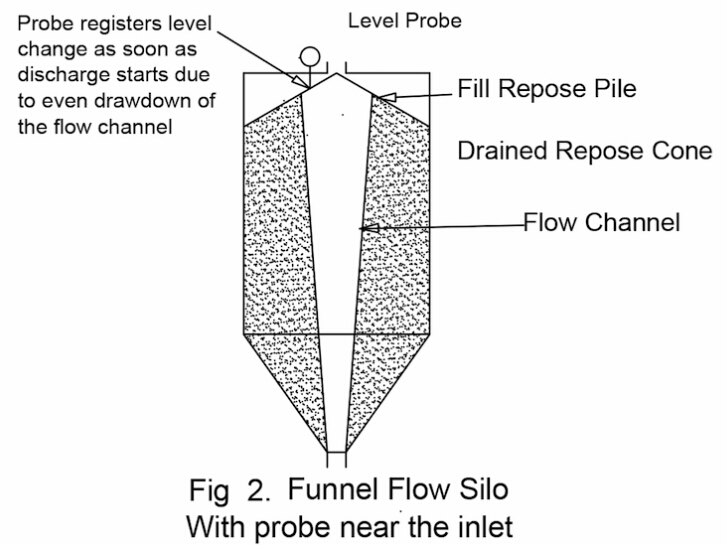
可以认为将探针重新定位到筒仓的中间半径将补偿这种自由基轮廓形状,因此它将会,但仅当它被放置在筒仓入口附近时。不幸的是,无论探头放在筒仓的哪一侧,这种差异都不会消除,如图2所示。
单点表面水平探测器可以放置在径向位置,其中倾倒或排水的休止斜率将指示相似的内容,但是如果填充顺序,内部和外部体积变化可以累积,而不是补偿差异。并清空表面轮廓在此水平附近重叠。如图3所示。
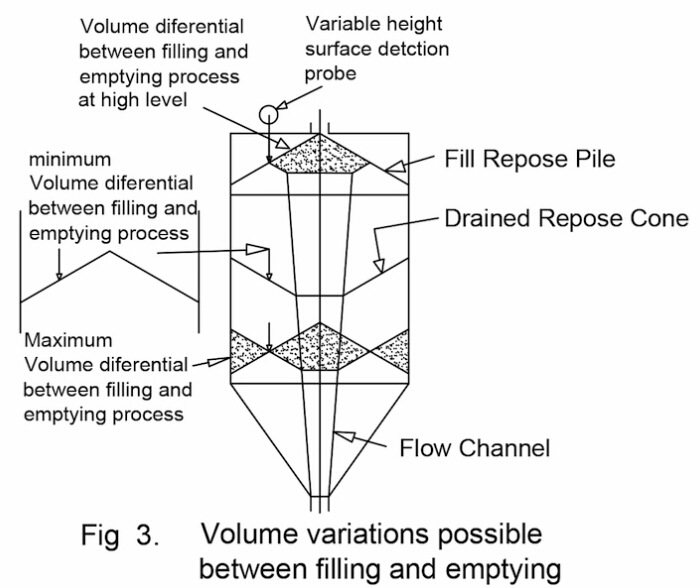
总之,先进的雷达液位计扫描可以适应表面轮廓的变化,并且筒仓的称重可以提供准确的内容值,但质量流量对于通过水平探测器指示准确的音量指示是必不可少的,即使这样,低水平指示也仅适用于足够高的位置臀部水平以抵消在会聚流动通道中不可避免地产生的速度差。
质量流量在密度一致性,流动可靠性和反向隔离方面具有许多其他益处,代价是额外的净空高度以及可能在出口附近的墙壁上长期磨损。
- [公司新闻] 磁翻板液位计有测量盲区吗 2021-12-06
- [行业新闻] 差压变送器该怎么维护 2021-11-29
- [行业新闻] 浮球液位计保养时注意事项 2021-11-25
- [公司新闻] 磁敏双色液位计与磁翻板液位计有什么区别 2021-11-16
- [公司新闻] 造成磁翻板液位计内浮子下沉的常见原因都 2021-11-10
- [技术专题] 石油储罐液位测量选择雷达液位计后的安装 2012-10-26
- [技术专题] 超声波液位计的优点和清洗方式 2012-10-20
- [技术专题] 怎样选购高温高压型磁翻板液位计 2012-10-20