

诊断与改进诊筒仓中储存的液位测量方案
雷达(GWR),超声波和脉冲雷达是飞行时间(TOF)技术,用于通过测量微波或超声波信号发送所需的时间来检测水平,从材料表面反射测量,并返回仪器。
测量用于容纳散装固体的筒仓水平(图1)可能会带来挑战。TOF装置使用基于超声系统中材料密度的反射,或基于雷达液位计材料的介电常数(DC)的反射。密度或DC-以及安装位置,筒仓的高度以及诸如支撑,混合器,灰尘,冷凝等干扰的存在 - 决定了每种应用的较佳选择。
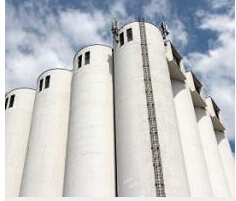
图1:雷达液位计非常适合测量容纳固体颗粒的高筒仓中的水平。
雷达液位计
GWR使用大约1.2 GHz脉冲雷达信号沿着导杆(图2)或电缆传播,使其成为“接触”装置; 也就是说,杆或电缆接触固体。当电介质遇到电介质变化时,能量会反射回发射器(空气的直流电压为1.0,大部分固体电压高于1.4)。发射器将时间减去加上返回时间2,然后乘以光速来计算水平。被测材料的DC对测量范围有显着影响。

图2:雷达有一根导向杆或电缆,雷达信号向下传播。
材料的DC越低,反射能量越少,从而减小了测量范围。当DC很低且干扰很多,或存在大量灰尘时,GWR技术可能是一个很好的选择。GWR技术与雷达之间的评估比较归结为效率。
当信号从GWR发射器发射时,它具有类似于足球大小的轮廓; 足球是由杆或绳索引导的。随着较小的占地面积向下和向后引导,可以提高效率,减少与入侵或灰尘的相互作用。然而,雷达信号以一定角度发出,其中占地面积增加,并且返回的反射不会被引导回发射器。在比较信号传输与安装问题时,GWR更有效。
超声波:声音选择
超声波传感器(图3)使用压电晶体产生机械脉冲,从传感器膜发射。由于空气和介质之间的密度变化,该声波从过程介质的表面反射。然后在传感器膜处接收反射的脉冲。反射脉冲(回波)的发送和接收之间的TOF直接对应于传感器和介质表面之间的距离。

图3:超声波传感器向筒仓中的固体表面发送声波脉冲,并测量反射信号的飞行时间以确定水平。
由于过去由于冷凝引起的问题,一些用户远离超声波传感器。但是,配备自动自清洁功能的超声波传感器可消除因冷凝引起的故障。
通过监测传感器膜上的信号幅度,通过抑制振幅来检测灰尘的凝结或累积。该装置可自动增加压电晶体的频率,产生自清洁效果,并确保传感器膜不受冷凝或积聚造成的阻尼影响。此功能允许使用超声波而无需考虑冷凝或积聚。
由于传感器的尺寸相对较小,超声波传感器非常适合安装在狭窄的地方,并且可以选择将传感器直接安装在筒仓的顶部。
超声波需要较小粒径大于0.1英寸才能获得可靠的反射。当需要额外的内部液位开关 - 例如驱动泵控制 - 那么超声波可能是较低价格点的较佳选择。
声波会因环境温度和湿度而衰减,因此如果筒仓经历大的温度变化和极端冷凝,或者如果存在蒸汽,那么超声波可能不是较佳选择。雷达不受气相区温度或空气中水分或冷凝的影响,因此在这些类型的应用中它可以很好地工作。
脉冲和FMCW雷达
仪器在IEEE规定的频段内运行。C波段介于4和8 GHz之间,因此大多数仪器的工作频率为6GHz; K波段介于18至27 GHz之间,大多数仪器使用26 GHz; 和W波段介于75和110 GHz之间,因此大多数仪器使用26GHz。使用这些频带中的每一个 - 以及何时何地使用它们 - 对波长和光束角度非常特定。
频率越小,波长越长。例如,我们可以通过浓雾听到雾角,因为它会产生一个长波长的低频声音以穿透雾气。波长较小的较高频率不能穿透雾。雷达物位测量也是如此。低频雷达 - 例如波长较长的6 GHz - 比短波长的26 GHz能够更好地穿透灰尘和蒸汽。
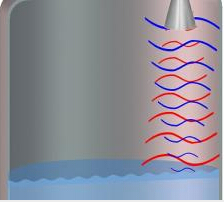
图4:在飞行时间雷达液位计中,通过测量微波信号传输,反射和返回仪器所需的时间来确定电平
确定使用哪个频率,波长和波束角取决于筒仓中的条件,如下所述。
在FMCW雷达中,发射器发送连续波并不断调制信号,通常从78到82 GHz。然后,发射机测量从发送信号(在已知频率)到以不同频率返回的信号的时间。该时间差与筒仓中的大块固体水平成正比。由于FMCW不断调制连续信号,因此在较高频率下添加滤波和增益设置比在较低频率下应用更有效,从而产生更稳定的信号,散装固体精度为±3mm。
早期的FMCW雷达使用昂贵的组件,与其他TOF设备相比,它们消耗更多的功率。因此,FMCW仅用于四线仪器架构。在过去几年中,组件的价格已经降低并且功耗更低,因此它现在可以以合理的价格在双线系统中运行。研究和现场测试证明,FMCW较适合W波段或26 GHz。
在脉冲雷达中,发射器发送微波脉冲。当微波能量到达被测材料时,阻抗的变化会导致能量被反射。反射的能量取决于被测材料的电介质。如上所述,时间向下和向后除以2,是光速提供距离的倍数。由于信号的分辨率,脉冲较适合较低的频率。查看评估软件中的返回信号,您会注意到26 GHz脉冲单元的返回峰值与26 GHz FMCW中非常尖锐的返回峰值相比更高。
高级诊断改进测量
多回波跟踪和诊断等高级功能大大改善了雷达液位变送器。
多回波跟踪识别返回信号的不同签名,检测与验证级别相比的错误级别,并忽略错误信号。首次调试水平仪器时,操作员会生成静态地图。这可以通过空筒仓或筒仓中的产品来完成。然后静态地图在后台运行,多回波跟踪处理结果信号。映射所有回波信号 - 新旧信号。如果障碍物突出到信号路径中,它们会产生相应的信号并被忽略。
新诊断使用高级算法自动评估26多个不同问题,发送警报并生成报告。例如,Endress + Hauser的心跳技术监测雷达发射器是否在喇叭上积聚灰尘,并评估返回信号的返回幅度或强度。随着灰尘累积,返回信号变得越来越少,随着时间的推移信号丢失。
例如,当返回幅度偏离设定的百分比-10%时,可以在信号丢失之前很久就触发警报。该警报器可包括一个开关,用于打开空气吹扫并清洁喇叭前部并积聚灰尘。这消除了信号丢失和不必要的维护访问。
预测测量的另一个潜在用途可能是发射机终端的电气连接。24 Vdc单元可以具有18伏特作为典型电源。可以监测电压是否由于腐蚀导致的劣化或由于水进入而导致的尖峰,并且“需要维护”状态可以通知人员在完全故障发生之前检查变送器处的电气终端。
光束角度和频率
TOF和FMCW技术之间较好的的显着差异是用于计算水平的算法。因此,选择雷达水平仪器取决于光束角度,频率及其预期应用 - 而不是在两种类似技术之间进行拾取。
射束角度 - 或雷达信号中的扩散量 - 取决于天线的大小和雷达信号的频率(图5)。例如,23度的较大扩展是由6英寸的低频6 GHz雷达产生的。天线。只有3度的较小扩展是由高频26 GHz雷达和3英寸产生的。天线。
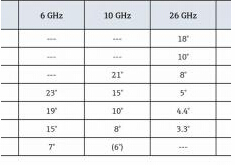
图5:光束角度根据雷达液位计信号的频率和天线尺寸而变化。
光束角度很重要,因为它决定了雷达液位计与筒仓壁的安装距离。光束不应该到达筒仓壁,因为它会干扰雷达信号,影响准确性和可靠性。例如,当具有大光束角的雷达液位计安装得太靠近侧壁时,这会在整个测量范围内引起非线性不准确。
窄光束角度使仪器可以安装在靠近筒仓墙的位置(图6),并且可以更容易地找到一个位置,在该位置它不会反射筒仓中的障碍物,例如水平开关和交叉支撑。

图6:理想情况下,雷达液位计应尽可能靠近筒仓壁安装,考虑到光束角度和安装它所需的孔尺寸所施加的限制。
天线尺寸很重要,因为它决定了筒仓顶部所需的开口尺寸。将仪器安装在筒仓壁附近可以较大限度地减少维护技术人员在筒仓顶部行走进行维修的需要,从而减少安全隐患。
较后,在填充和排空期间散装固体产品的休止角需要调整喇叭以优化返回信号。可调角度过程连接允许正确对准筒仓中干燥产品的角度。
26GHz FMCW仪器的应用包括具有小过程连接的筒仓,因为其较高的频率提供较小的光束角度并允许使用较小的天线尺寸。一台26GHz的仪器甚至可以通过全口球阀或扩展喷嘴进行射击。
26GHz雷达液位计适用于长达410英尺的测量范围,具有许多障碍物的应用,高大的细长筒仓和带锥形底部的筒仓。它也适用于小颗粒尺寸(<0.17英寸),因为波长越短,它可以反射的颗粒尺寸越小,而没有远离喇叭的大量偏转。这再次呼吁对上述效率的讨论。通过确保反射和返回发射器,发送信号的效率越高,过程测量就越可靠。
可能是用于粉末和散装固体应用的较广泛使用的雷达液位计是26 GHz脉冲雷达。这些仪器已用于450,000多种应用,包括测量范围高达230英尺,极端灰尘,频繁填充和空操作,需要快速响应。与FMCW相比,26 GHz脉冲雷达具有更少的信号滤波和算法处理,可实现更快的转换和对过程变化的响应。
总结
超声波和雷达液位计是较适合用于粉末和散装固体应用的技术,但在选择正确的技术和指定功能时必须小心。必须考虑筒仓内的粒度,梁宽和条件,包括障碍物,灰尘和湿气的存在。与熟悉所有可用测量技术的专家合作可以帮助简化选择任务并为每个应用指定正确级别的仪器。
- [公司新闻] 磁翻板液位计有测量盲区吗 2021-12-06
- [行业新闻] 差压变送器该怎么维护 2021-11-29
- [行业新闻] 浮球液位计保养时注意事项 2021-11-25
- [公司新闻] 磁敏双色液位计与磁翻板液位计有什么区别 2021-11-16
- [公司新闻] 造成磁翻板液位计内浮子下沉的常见原因都 2021-11-10
- [技术专题] 石油储罐液位测量选择雷达液位计后的安装 2012-10-26
- [技术专题] 超声波液位计的优点和清洗方式 2012-10-20
- [技术专题] 怎样选购高温高压型磁翻板液位计 2012-10-20